![]()
Microcontrôleurs - Entrées, sorties (GPIO)

[Mise à jour le : 19/2/2025] En cours de rédaction
- Source
CARTES DE TEST
Les exemples de code de cette page ont été testés sur une Arduino Uno, une Arduino MKR Wifi 1010, une ESP32 Feather Huzzah et sur une Raspberry Pi Pico.1. Généralités
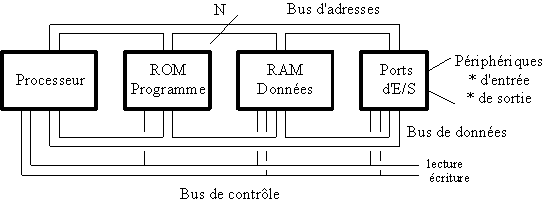
« D'un point de vue fonctionnel, dans un système à base de microcontrôleur1), on appelle entrées-sorties les échanges d'informations entre le processeur et les périphériques qui lui sont associés. De la sorte, le système peut réagir à des modifications de son environnement, voire le contrôler. Les entrées, sorties sont parfois désignées par l'acronyme I/O, issu de l'anglais Input/Output ou encore E/S pour Entrées/Sorties. » Wikipédia
GPIO
« D'un point de vue matériel, un microcontrôleur dispose de broches2) pouvant être contrôlées par un logiciel. Elles peuvent se comporter comme des entrées ou des sorties, d'où le nom “Entrée / Sortie à usage général”, ou GPIO (General Purpose Input Output. Le nombre de broches d’un microcontrôleur étant limité, il est fréquent d’avoir plusieurs fonctionnalités sur une même broche. » Wikipédia1.1 Exemples de microcontrôleurs
- Documentation sur le site Microchip.
- Documentation sur le site Raspberry Pi.
- Documentation sur le site Raspberry Pi.
- Documentation sur le site ESP32.
1.2 Cartes de prototypage
- Documentation sur le site Arduino.
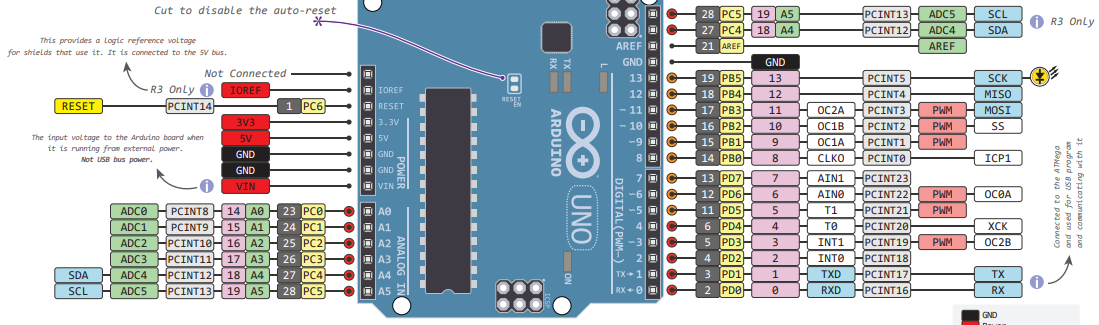
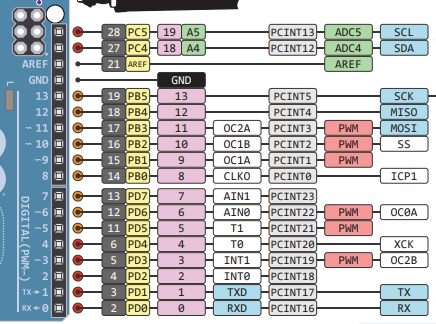
- Les broches du microcontrôleur sont reliées électriquement aux broches des connecteurs de la carte. Un SYNOPTIQUE identifie ces liens.
Exemple : on voit sur ce schéma que la broche 19 du microcontrôleur est reliée avec la broche 13 du connecteur de la carte.
ATTENTION : dans l'environnement de programmation Arduino, le programme fait référence à la connectique de la carte et non à celle du microcontrôleur !
- Documentation sur le site Raspberry Pi.
- Documentation sur le site Raspberry Pi.
2. Entrées, sorties numériques
2.1 Généralités
Pour éviter de faire référence à des valeurs électriques (tension ou intensité), on définit souvent l’état d’un signal numérique en utilisant la logique booléenne.
- true (« 1 » logique ou HIGH)
- false (« 0 » logique ou LOW) .
- (Vcc = 5V - 25°C)
| Niveau logique | Signal de sortie (Output) | Signal d'entrée (Input) |
|---|---|---|
| LOW | 0V à 0,5V (VoL)3) pour 0 à 20mA (IoL) | 0V à 2,2V (Vil4)) |
| HIGH | 4,5V à 5V (VoH)5) pour 0 à 20mA (IoH) | 2,7V à 5V (ViH6)) |
LIMITES A RESPECTER
Le courant maximum en sortie sur une broche ne doit pas dépasser 40mA. Au total, il ne doit pas dépasser 200mA.- A rédiger
- A rédiger
2.2 Sortie numérique
2.2.1 Généralités
Lorsqu'une broche est configurée en sortie numérique, le microcontrôleur délivre des signaux logiques “0”(LOW) ou “1“(HIGH).
PRECAUTIONS D'UTILISATION
Une sortie numériqque est fragile. Ne JAMAIS la relier à un générateurUne sortie numérique délivre très peu de puissance (quelques centaines de mW). Il n’est donc pas possible de la relier directement à un actionneur (moteur). Il est nécessaire de placer une interface de puissance (hacheur, relais) entre elle et l’actionneur à commander.

2.2.2 Programmation
Les programmes suivants sont codés :
- En langage C sur Arduino Uno ou compatible
- En langage MicroPython sur Raspberry Pi Pico et ESP32

- a. Présentation
Toutes les broches d'E/S de la carte Arduino Uno peuvent servir d'entrées, sorties numériques. Cela inclut les broches numérotées entre 0 et 13, mais aussi les broches A0 à A5. Le symbole ~ identifie les broches capables de délivrer un signal numérique PWM (Pulse With Modulation).
SCHEMA DE LA CARTE
Téléchargeable ici.- b. Configuration d'une broche en sortie
- Ressource : pinMode() sur le site arduino.cc
CONFIGURATION
Configurer une broche signifie qu'on précise qu'elle doit se comporter soit comme une entrée d'information, soit comme une sortie d'information.- *.cpp
// Exemple 1 // ------------------------------------------------------------------------------------------------------------------------------- // Les instructions contenues dans la fonction setup() s'exécutent une fois void setup() { pinMode(12,OUTPUT); // Associé à OUTPUT pinMode force la broche 12 de la carte Arduino Uno à se comporter comme une sortie } // Exemple 2 // ------------------------------------------------------------------------------------------------------------------------------- // L'utilisation de la directive "define" améliore la lisibilité des programmes #define led 12 void setup() { pinMode(led,OUTPUT); // On précise que la broche 12 de la carte Arduino Uno se comporte comme une sortie et est connectée à une LED }
- c. Ecriture d'un état logique sur une broche
- Ressource : digitalWrite() sur le site arduino.cc
ECRITURE
Un état logique haut(HIGH) ou bas(LOW) peut être écrit sur une broche préalablement configurée en sortie.- *.cpp
// Exemple 1 // ------------------------------------------------------------------------------------------------------------------------------- // Les instructions contenues dans la fonction setup() s'exécutent une fois void setup() { pinMode(12,OUTPUT); // Associé à OUTPUT pinMode force la broche 12 de la carte Arduino Uno à se comporter comme une sortie } // Les instructions contenues dans la fonction loop() s'exécutent tant que le microcontrôleur est sous tension void loop() { digitalWrite(12, HIGH); // La broche 12 présente un état logique haut (par exemple 5V) } //Exemple 2 // ------------------------------------------------------------------------------------------------------------------------------- // L'utilisation de la directive define améliore la lisibilité des programmes #define led 12 void setup() { pinMode(led,OUTPUT); } void loop() { digitalWrite(led, HIGH); // On applique un état logique haut (par exemple 5V) à la LED => elle s'éclaire }
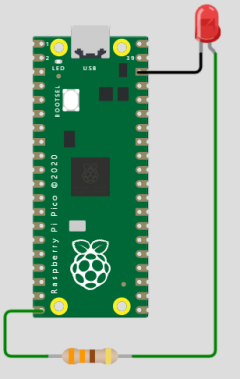
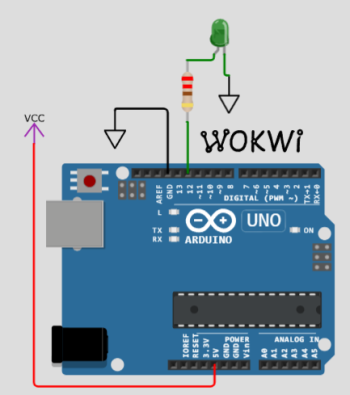 d. Synthèse: blink
d. Synthèse: blink
- *.cpp
// Faire clignoter une led connectée à la broche 12 de la carte Arduino Uno // Matériels : Carte Arduino, led, résistance // IDE: Arduino 2.x.x // Fichier : blink.ino #define led 12 void setup() { pinMode(led,OUTPUT); } void loop() { digitalWrite(led, HIGH); delay(500); // Attente 0,5s digitalWrite(led, LOW); delay(500); // Attente 0,5s }
- a. Présentation
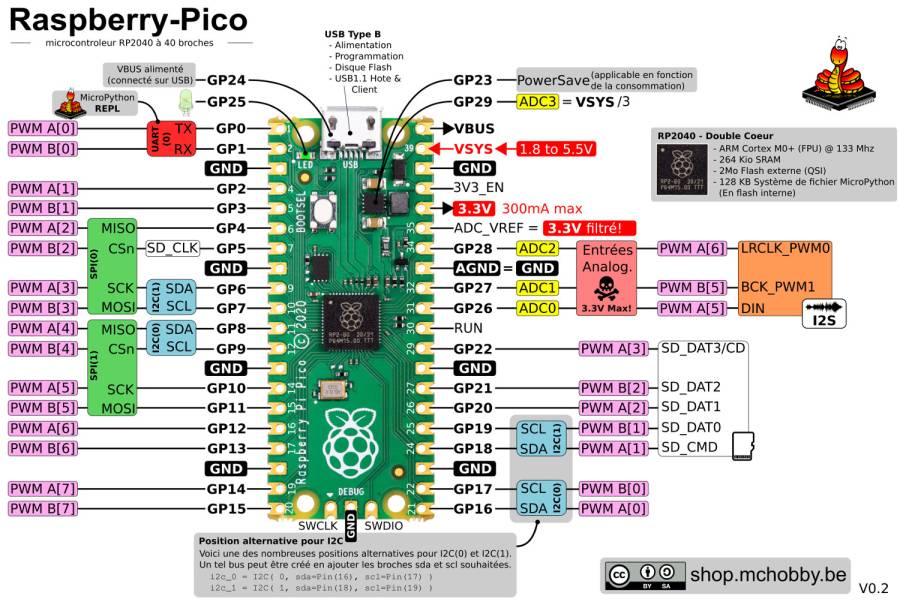
La majeure partie des broches du Raspberry Pi Pico sont des GPIO nommées « GPxx » ci-dessous.
- b. Configuration d'une broche en sortie
- Ressources sur Micropython.org.
- *.py
# Exemples from machine import Pin # Bibliothèque nécessaire aux E/S # Exemple 1 : configuration en sortie de la broche 15 connectée à une led led = Pin(15,Pin.OUT) # Associée à Pin.OUT, Pin force la broche 15 de la carte Rpi Pico à se comporter comme une sortie # ou led = Pin(Pin.board.GP15,Pin.OUT) # pour plus de clarté # Exemple 2 : configuration en sortie de la broche associée à la led de la carte led_carte = Pin('LED',Pin.OUT) # 'LED' <=> 25 (GPIO25) # Associée à Pin.OUT, Pin force la broche 25 de la carte Rpi Pico # à se comporter comme une sortie
- c. Ecriture d'un état logique sur une broche
- Ressources sur Micropython.org.
- *.py
from machine import Pin # Bibliothèque # Configuration de la broche associée à la led de la carte led_carte = Pin('LED',Pin.OUT) # 'LED' <=> 25 (GPIO25) # Exemples # Ecriture d'un "1" sur GPIO25 -> la LED s'éclaire led_carte.on() # Ecriture d'un "0" sur GPIO25 -> la LED s'éteint led_carte.off()
- d. Synthèse: Blink.py
- Ressources sur Micropython.org.
- blink.py
# ------------------------------------------------------------------------------- # Faire clignoter une led externe à la carte Raspberry Pi Pico # Matériels : Raspberry Pi Pico, led, Shield Grove # IDE : Thonny # Fichier : blink.py # ------------------------------------------------------------------------------- # Bibliothèques from machine import Pin import time # Configuration de la broche associée à la led de la carte led = Pin(Pin.board.GP15,Pin.OUT) # (GPIO15) while (True): led.on() time.sleep(0.5) # Attente 0,5s led.off() time.sleep(0.5) # Attente 0,5s
- a. Présentation
La majeure partie des broches du Raspberry Pi Pico sont des GPIO.
- b. Configuration d'une broche en sortie
- Ressources sur MicroPython.org
- *.py
# Exemple from machine import Pin # Bibliothèque nécessaire aux E/S # Configuration en sortie de la broche associée à la led de la carte led_carte = Pin(13,Pin.OUT) # Associée à Pin.OUT, Pin force la broche 13 de la carte ESP32 # à se comporter comme une sortie
- c. Ecriture d'un état logique sur une broche
- Ressources sur Micropython.org.
- *.py
from machine import Pin # Bibliothèque nécessaire aux E/S # Configuration en sortie de la broche associée à la led de la carte led_carte = Pin(13,Pin.OUT) # Associée à Pin.OUT, Pin force la broche 13 de la carte ESP32 # à se comporter comme une sortie # Exemples # Ecriture d'un "1" sur GPIO13 -> la LED s'éclaire led_carte.on() # Ecriture d'un "0" sur GPIO13 -> la LED s'éteint led_carte.off()
- d. Synthèse: Blink.py
- Ressources sur Micropython.org.
- blink.py
# ------------------------------------------------------------------------------- # Faire clignoter la led de la carte ESP32 Feather Huzzah # IDE : Thonny # Fichier : blink.py # ------------------------------------------------------------------------------- # Bibliothèques from machine import Pin import time # Configuration de la broche associée à la led de la carte led_carte = Pin(13, Pin.OUT) while (True): led_carte.on() time.sleep(1) # Attente 1s led_carte.off() time.sleep(1) # Attente 1s
2.3 Sortie numérique (PWM)
2.3.1 Généralités
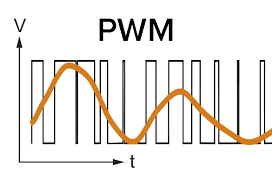
La Modulation de Largeur d'Impulsions (MLI ; en anglais PWM pour Pulse Width Modulation), est une technique couramment utilisée pour synthétiser des signaux pseudo analogiques à l'aide de circuits numériques (“1” ou “0”).
Le PWM est utilisé par exemple pour contrôler la luminosité d'une LED, changer la couleur d'une LED RGB ou encore piloter la vitesse d'un moteur.
Le principe est de créer un signal prenant les valeurs “1” ou “0”, à fréquence fixe mais dont le rapport cyclique est contrôlé numériquement, la valeur moyenne de ce signal étant une grandeur analogique, égale au produit du rapport cyclique par l'amplitude maximale du signal. Wikipédia
2.3.2 Programmation
Les programmes suivant sont codés :
- En langage C sur Arduino Uno ou compatible
- En langage MicroPython sur Raspberry Pi Pico et ESP32
- Ressource : analogWrite() sur le site arduino.cc
- a. Présentation
| Cartes | Broche PWM | Fréquence | Repérage de la broche PWM sur la carte |
|---|---|---|---|
| Uno, Nano, Mini | 3, 5, 6, 9, 10, 11 | 490 Hz (broches 5 et 6: 980 Hz) | ~ |
SCHEMA DE LA CARTE
Téléchargeable ici.- b. Configuration d'une broche en sortie et génération d'un signal PWM
- *.cpp
// Exemple // -------------------------------------------------------- // Diminution de la luminosité d'une led avec un signal PWM #define led 11 // Les instructions contenues dans la fonction setup() s'exécutent une fois void setup() { pinMode(led, OUTPUT); // Associé à OUTPUT pinMode force la broche 11 de la carte Arduino Uno à se comporter comme une sortie } // Les instructions contenues dans la fonction loop() s'exécutent tant que le microcontrôleur est sous tension void loop() { analogWrite(led, 127); // La broche 11 délivre un signal PWM de fréquence F=490Hz // et de rapport cyclique = 1/2 (voir la ressource pour le calcul du rapport cyclique) }
- A faire
- A faire
Ressource provisoire ESP32/ESP8266 PWM with MicroPython – Dim LED
2.4 Entrée numérique
2.4.1 Généralités
Lorsqu'une broche est configurée en entrée numérique, le microcontrôleur est capable de traiter des signaux prenant la valeur logique “0” ou “1”.
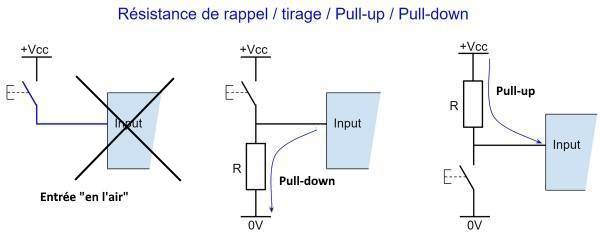
RESISTANCE DE RAPPEL
Les microcontrôleurs disposent de résistances de rappel internes pouvant être connectées par le logiciel.Une entrée numérique utilisée dans un programme ne doit pas être laissée “en l’air” (non connectée) car elle prendra alors un état logique aléatoirement et le comportement du programme deviendra imprévisible.
Exemple : détermination de l'état ouvert ou fermé d'un bouton-poussoir.
PRECAUTIONS D'UTILISATION
Les entrées numériques sont fragiles. Elles ne supportent ni les décharges électrostatiques ni les surtensions. Il ne faut ni les toucher ni leur appliquer une tension supérieure à 5V ou inférieure à 0V.
2.4.2 Programmation
Les programmes suivant sont codés :
- En langage C sur Arduino Uno ou compatible
- En langage MicroPython sur Raspberry Pi Pico et ESP32
- a. Présentation
Toutes les broches d'E/S de la carte Arduino Uno peuvent servir d'entrées, sorties numériques. Cela inclut les broches numérotées entre 0 et 13, mais aussi les broches A0 à A5. Le symbole ~ identifie les broches capables de délivrer un signal numérique PWM (Pulse With Modulation).
SCHEMA DE LA CARTE
Téléchargeable ici.- b. Configuration d'une broche en entrée
- Ressource : pinMode() sur le site arduino.cc
CONFIGURATION
Configurer une broche signifie qu'on précise qu'elle doit se comporter soit comme une entrée d'information, soit comme une sortie d'information.

- *.cpp
// Exemple 1 : connexion d'une broche à un bouton-poussoir via une résistance pull-down // externe à la carte Arduino Uno (celle-ci n'en dispose pas en interne!). // ------------------------------------------------------------------------------------------ // Les instructions contenues dans la fonction setup() s'exécutent une fois void setup() { pinMode(2,INPUT); // Associé à INPUT pinMode force la broche 2 de la carte Arduino Uno // à se comporter comme une entrée // Optionnel si la broche n'a pas été préalablement // configurée en sortie, car c'est le mode par défaut } // ------------------------------------------------------------------------------------------ // Exemple 2 // ------------------------------------------------------------------------------------------ // L'utilisation de la directive "define" améliore la lisibilité des programmes #define BP 2 void setup() { pinMode(BP,INPUT); // On précise que la broche 2 de la carte Arduino Uno se comporte comme // une entrée et est connectée à un bouton-poussoir // optionnel si la broche n'a pas été préalablement // configurée en sortie, car c'est le mode par défaut }

- *.cpp
// Exemple 3 : connexion d'une broche à un bouton-poussoir via la résistance de pull-pup interne // de la carte arduino uno. On économise ainsi 1 composant // --------------------------------------------------------------------------------------------- // L'utilisation de la directive "define" améliore la lisibilité des programmes #define BP 2 void setup() { pinMode(BP, INPUT_PULLUP);; // On précise que la broche 2 de la carte Arduino Uno est connectée à la // résistance de pull-up interne, se comporte comme une entrée et est // connectée à un bouton-poussoir }
c. Lecture de l'état logique sur une broche
- Ressource : digitalRead() sur le site arduino.cc
LECTURE
Un état logique haut(HIGH) ou bas(LOW) peut être lu sur une broche préalablement configurée en entrée.- *.cpp
// Exemple 1 // ------------------------------------------------------------------------------------------------------------------------------- // Les instructions contenues dans la fonction setup() s'exécutent une fois void setup() { pinMode(2,INPUT); // Associé à INPUT pinMode force la broche 2 de la carte Arduino Uno à se comporter comme une entrée // ou pinMode(2, INPUT_PULLUP); selon le montage utilisé } // Les instructions contenues dans la fonction loop() s'exécutent tant que le microcontrôleur est sous tension void loop() { bool etat_bp = digitalRead(2); // L'état logique sur l'entrée 2 est transféré dans une variable de type booléen } //Exemple 2 // ------------------------------------------------------------------------------------------------------------------------------- // L'utilisation de la directive define améliore la lisibilité des programmes #define bp 2 void setup() { pinMode(bp,INPUT); // ou pinMode(bp, INPUT_PULLUP); selon le montage utilisé } void loop() { bool etat_bp = digitalRead(bp); // L'état logique sur l'entrée 2 est transféré dans une variable de type booléen, cette entrée // est reliée à un bouton-poussoir }
 d. Synthèse: ledbp
d. Synthèse: ledbp
- *.cpp
// Titre : LED_BP // Description : la led s’éclaire lorsqu’on presse le bouton-poussoir (BP), elle s’éteint lorsqu’on le relâche. // Entrées, sorties #define led 12 #define bp 2 bool etat_bp; void setup() { // Configuration des E/S pinMode(led, OUTPUT); pinMode(bp, INPUT_PULLUP); } void loop() { // Lecture de l’entrée bool etat_bp = !(digitalRead(bp)); // le bouton-poussoir étant actif à l'état bas "0" alors que la led l'est à l'état haut "1" // nécessite d'inverser l'état logique de la variable etat_bp digitalWrite(led,etat_bp); // Ecriture de l’entrée sur la sortie }
- Ressources sur Micropython.org.
- b. Configuration d'une broche en en entrée
- c. Lecture de l'état logique sur une broche
- d. Synthèse: ?.cpp
Exemple de code pour un Raspberry Pi Pico
- *.py
# Configuration (en entrée) des broches connectées à deux boutons-poussoirs # Bibliothèques à installer from machine import Pin # Configuration (en entrée) des broches connectées à deux boutons-poussoirs button_min = Pin(20, Pin.IN) button_hr = Pin(21, Pin.IN) ...
- Ressources sur Micropython.org.
- b. Configuration d'une broche en en entrée
- c. Lecture de l'état logique sur une broche
- d. Synthèse: ?.cpp
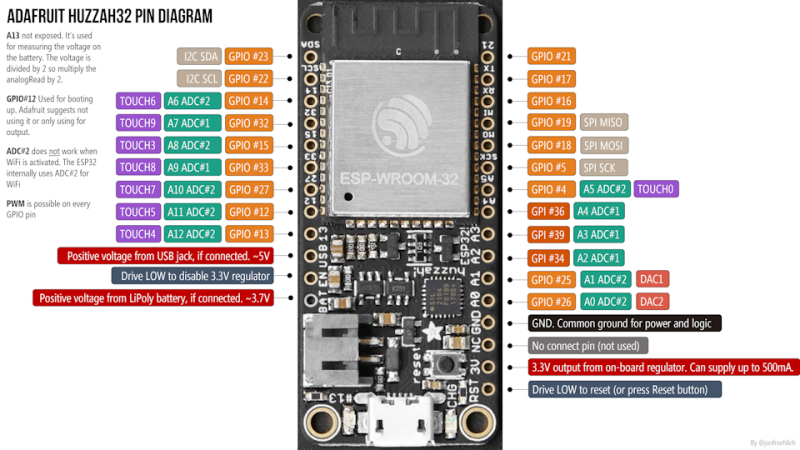
Exemple de code pour un ESP32 Feather Huzzah
- *.py
# Configuration (en entrée) des broches connectées à deux boutons-poussoirs button_min = Pin(25, Pin.IN) button_hr = Pin(26, Pin.IN) ...
2.5 Entrée d'interruption
2.5.1 Généralités
Une interruption est un arrêt temporaire de l'exécution normale d'un programme par le processeur afin d'exécuter un autre programme (appelé service d'interruption).
L’interruption est provoquée par une cause externe (action sur un bouton-poussoir, mesure réalisée par un capteur, horloge temps réel, etc.).
On utilise les interruptions afin de permettre des communications non bloquantes avec des périphériques externes.
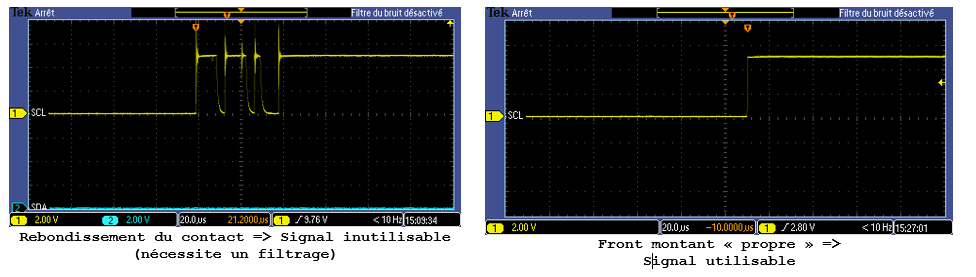
Une interruption tient compte de l’état logique présent sur une broche. Couramment, on la déclenchera sur le front montant, le front descendant, ou chacun des fronts d’un signal logique.
2.5.2 Programmation
Les programmes suivant sont codés :
- En langage C sur Arduino Uno ou compatible
- En langage MicroPython sur Raspberry Pi Pico et ESP32
- Ressource :
a. Présentation
b. Configuration d'une broche en entrée d'interruption
c. Evènement et gestionnaire d'interruption
d. Synthèse: ?
- Ressource :
a. Présentation
b. Configuration d'une broche en entrée d'interruption
c. Evènement et gestionnaire d'interruption
d. Synthèse: ?

- Ressource : Quick reference for ESP32, GPIO Pins, External interrupts sur Micropython.org.
a. Présentation
- Ressource provisoire MicroPython: Interrupts with ESP32 and ESP8266
b. Configuration d'une broche en entrée d'interruption
c. Evènement et gestionnaire d'interruption
d. Synthèse: HORLOGE NUMERIQUE

- Description : l'extrait du programme HORLOGE ci-dessous illustre l'utilisation d'interruptions assurant le réglage de l'heure à l'aide de trois boutons-poussoir. Une vidéo de présentation est accessible ici.
- *.py
# ----------------------------------------------- # Code partiel du programme HORLOGE # ----------------------------------------------- # Réglage de l'heure à la mise sous tension time_offset=12*3600+0*60+0 # hh+mm+ss # Routines de service d'interruption (ISR) def handle_interrupt_min(pin): global time_offset time_offset+=60 time.sleep(.2) def handle_interrupt_hr(pin): global time_offset time_offset+=3600 time.sleep(.2) # Réglage des minutes # Ajout de 60s à l'heure initiale button_min = Pin(25, Pin.IN) # Gestionnaire d'interruption button_min.irq(trigger=Pin.IRQ_RISING,handler=handle_interrupt_min) # Réglage des heures # Ajout de 3600s à l'heure initiale button_hr = Pin(26, Pin.IN) # Gestionnaire d'interruption button_hr.irq(trigger=Pin.IRQ_RISING,handler=handle_interrupt_hr) {{ :python:micropython:materiel:thonny.png?nolink&70|}}
3. Entrées analogiques
- Ressource : site Arduino
3.1 Généralités
3.2 Programmation
b. Configuration d'une broche en entrée analogique
c. Lecture d'une entrée analogique
d. Synthèse: ?
b. Configuration d'une broche en entrée analogique
c. Lecture d'une entrée analogique
 d. Synthèse: ?
d. Synthèse: ?
- Ressource
- ADC (analog to digital conversion) | class Pin – control I/O pins sur Micropython.org.
Exemple de code pour un Raspberry Pi Pico
- *.py
# ------------------------------------------------------------------------------- # Lecture et affichage dans la console de la tension issue d'un potentiomètre # Date : 22/5/2023 # Matériels : Raspberry Pi Pico, Shield Grove, pot. 10k # ADC accessibles sur le shield Grove pour RP2 : # Connecteur: ADC : GPIO # A0 : ADC0 : 26 # A1 : ADC0,ADC1: 26,27 # A2 : ADC1,ADC2: 27,28 # IDE : Thonny # ------------------------------------------------------------------------------- from machine import ADC, Pin import time # Le potentiomètre 10kOhm est connecté à l'entrée analogique A0 du shield. # Attention : La tension doit être comprise entre 0 - 3,3V (3,6V max !) # sur une entrée analogique. # Configuration pot = ADC(Pin(26)) while (True): val=pot.read_u16() # lecture de l'ADC U = val*3.3/65535 # Calcul de la tension print("%.2f" % U) # Affichage dans la console (formaté à 2 décimales) time.sleep(1)
Ressource provisoire : ESP32/ESP8266 Analog Readings with MicroPython
b. Configuration d'une broche en entrée analogique
c. Lecture d'une entrée analogique
d. Synthèse: ?
- Ressource
- ADC (analog to digital conversion) sur Micropython.org.
Exemple de code pour un ESP32 Feather Huzzah
- *.py
# ADC accessibles en Python sur la carte ESP32 Feather Huzzah : # ADC:GPIO # A2 : 34 # A3 : 39 # A4 : 36 # A7 : 32 # A9 : 33 from machine import ADC, Pin # Le potentiomètre 10kOhm est connecté à l'entrée analogique A2 de l'ESP32. # Configuration adc = ADC(Pin(34)) # Sur une entrée analogique, la tension doit # être comprise entre 0 - 3,3V (3,6V max !) adc.atten(ADC.ATTN_11DB) # voir doc # Mesure value = adc.read() print(value) # affichage dans la console
pour aller plus loin
SISEL SA - Entrées-sorties d’un microcontrôleur