![]()

Matériels - Horloge Temps Réel (HTR) I²C
[Mise à jour le 30/7/2024]
Lecture connexe
1. Généralités
Une horloge temps réel (abrégé en HTR, en anglais real-time clock ou RTC), est une horloge permettant un décompte très précis du temps (par exemple en nanosecondes) pour un système électronique, en vue de dater ou déclencher des évènements selon l'heure. Par rapport à l'horloge à quartz, l'horloge en temps réel réduit le risque de panne mécanique. Il peut donc être utilisé dans un environnement très vibratoire. Wikipédia
2. DS1307

2.1 Généralités
- Description
L'horloge temps réel (RTC) à circuit DS1307 est une horloge / calendrier BCD (décimal codé binaire) disposant de 56 octets de NV SRAM. Elle communique avec un microcontrôleur via un bus I2C.
Ce circuit fournit l'année, le mois, le jour, les heures, les minutes et les secondes en tenant compte des années bissextiles. L'horloge fonctionne au format 24 heures ou 12 heures avec l'indication AM / PM. Un circuit de détection de puissance intégré passe automatiquement sur une alimentation de secours en cas de coupure du courant.
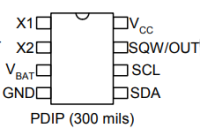
- Brochage
- Application typique
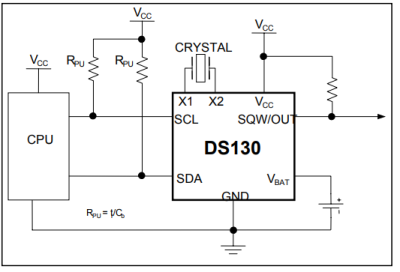
![]()
- Documentation
- Datasheet du circuit DS1307 à télécharger ici.
2.2 Module MR005 de Microrobot

2.2.1 Présentation
- Sources
- Site : microbot.it
- Distributeur : Gotronic
- Caractéristiques
- Alimentation 4,5 à 5,5 Vcc
- Consommation: 1,5 mA
- Sauvegarde: 1 pile type CR2032
- Informations:
- secondes, minutes et heures
- jour, mois, année
- Protocole I²C (SLA = 0x68)
- Sortie drain ouvert : signal logique de fréquence réglable (f=1Hz, 4kHz, 8kHz, 32kHz)
- Dimensions: 32 x 23 x 11 mm
- Poids: 5g
2.2.2 Bibliothèques
- Documentation de la bibliothèque Adafruit pour Arduino : RTClib
- A partir du gestionnaire de bibliothèques de l'IDE Arduino, installer :

ou
![]()
- Télécharger le fichier DFRobot_DS1307-master.zip sur Github, le dézipper et le placer dans le dossier : …\Documents\Arduino\Libraries.

2.2.3 Exemples de code
- Exemple de l'IDE Arduino pour tester le capteur
Dans l'IDE Arduino, sélectionner : Fichier → Exemples → RTClib → DS1307
2.3 Module Adafruit ADA3296 (équivalent de MR005)

2.3.1 Présentation
- Caractéristiques
- Alimentation 5 Vcc
- Sauvegarde: 1 pile 3V type CR1220
- Informations:
- secondes, minutes et heures
- jour, mois, année
- correction années bissextiles jusque 2100
- Protocole I²C
- Sortie drain ouvert : signal logique de fréquence réglable (f=1Hz, 4kHz, 8kHz, 32kHz)
- Dimensions: 26 x 22 x 5 mm
- Poids: 2,3g
3. DS3231M
3.1 Présentation

- Source : wiki DFROBOT
- Distributeur : GoTronic
- Caractéristiques
- Alimentation 3,3 à 5,5 Vcc
- Consommation: 130 µA
- Sauvegarde: 1 pile type CR1220 (non incluse)
- Informations:
- secondes, minutes et heures
- jour, mois, année
- format: 24 heures ou 12 heures AM/PM
- gestion des années bisextiles
- Précision: ± 5 ppm (±0,432 secondes/jour)
- Interface série I2C : SLA = 0x68
- Température de service: -40 à 85 °C
- Dimensions: 22,5 x 21 mm
- Application typique

- Schéma-blocs

- Signaux
- SCL, SDA : clock et data du bus I2C
- INT : interruption en sortie de niveau bas ou d'onde carrée de 1 Hz
- RST : Réinitialisation du processeur
- 32K : Sortie 32,768 kHz
Interruption
Voir attachInterrupt() pour la correspondance entre les numéros d'interruption et les broches d'E/S.
![]()
- Documentation
- Datasheet à télécharger ici

- Chronogrammes
- Relevé des signaux du bus I2C faite lors d'une configuration du circuit pour générer un signal 1HZ sur INT. A télécharger ici.
3.2 Bibliothèques
- Télécharger la fichier DFRobot_DS3231M-master.zip disponible sur GitHub le dézipper et l'installer dans le dossier : …\Documents\Arduino\Libraries
3.3 Exemples de code
- Ressources
- Fiche guide pour l'étude d'une chaîne d'information comprenant une HTR DS3231M [Télécharger]


- Exemple pour tester l'HTR
![]()
- *.cpp
// Code testé sur Arduino Uno et Arduino MKR Zéro // Interruption générée toutes le 1s par une HTR à DS3231M #include "DFRobot_DS3231M.h" // Broche utilisée pour l'interruption // Arduino UNO : 2 (D2) // Arduino MKR0 ou MKR Wifi1010 : 0 (D0) const byte interruptPin = 0; int i=0; DFRobot_DS3231M rtc; void setup() { pinMode(interruptPin, INPUT_PULLUP); // INT du circuit DS3231M sur drain ouvert Serial.begin(115200); // Sortie dans la console /* On attend que l'initialisation du DS3231M soit complète */ while (rtc.begin() != true) { Serial.println("Circuit non initialisé, vérifier les connexions. "); delay(1000); } /*! *@brief Broche INT *@param mode eDS3231M_OFF = 0x01 // Désactivation du signal en sortie, DS3231M en mode interruption *@n eDS3231M_SquareWave_1Hz = 0x00 // signal carré 1Hz *@n eDS3231M_SquareWave_1kHz = 0x08 // signal carré 1kHz *@n eDS3231M_SquareWave_4kHz = 0x10 // signal carré 4kHz *@n eDS3231M_SquareWave_8kHz = 0x18 // signal carré 8kHz */ rtc.writeSqwPinMode(eDS3231M_SquareWave_1Hz); // digitalPinToInterrupt convertit le n° de broche en n° d'interruption attachInterrupt(digitalPinToInterrupt(interruptPin), interrupt_handler, RISING); } void loop() { // Mettre le code répétitif ici } void interrupt_handler() { Serial.println("Hello " + (String)i++); }