![]()
Capteurs - Météorologie
[Mise à jour le 30/7/2024]
1. La météorologie
La météorologie est une science qui a pour objet l'étude des phénomènes atmosphériques tels que les nuages, les précipitations ou le vent dans le but de comprendre comment ils se forment et évoluent en fonction des paramètres mesurés tels que la pression, la température et l'humidité. Wikipédia
2. Vitesse et direction du vent
2.1 Généralités

2.1.1 Le vent
Le vent est le mouvement au sein d’une atmosphère, masse de gaz située à la surface d'une planète, d'une partie de ce gaz. Les vents sont globalement provoqués par un réchauffement inégalement réparti à la surface de la planète provenant du rayonnement stellaire (énergie solaire), et par la rotation de la planète. Sur Terre, ce déplacement est essentiel à l'explication de tous les phénomènes météorologiques. Le vent est mécaniquement décrit par les lois de la dynamique des fluides, comme les courants marins. Il existe une interdépendance entre ces deux circulations de fluides. Wikipédia

- Ressources
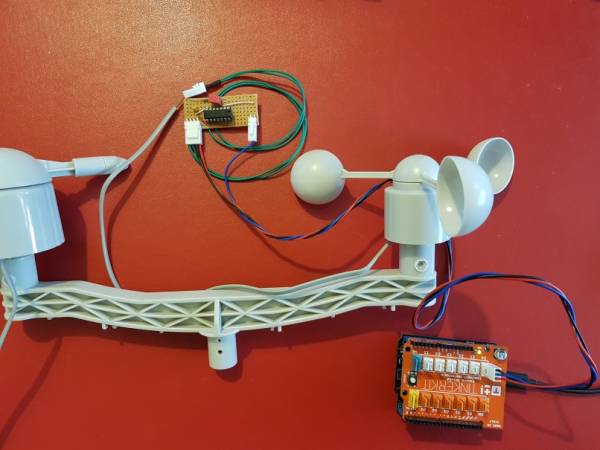
2.2 Anémomètre à coupelles
2.2.1 Anémomètre numérique

2.1.1.1 Présentation
- Distributeur : Gotronic
- Caractéristiques
- L'anémomètre délivre une impulsion par tour (une vitesse de 2,4 km/h donne une impulsion par seconde).
- La girouette peut donner la direction du vent sur 16 secteurs (grâce à une combinaison de résistances et 8 ILS).*
![]()
- Documentation
- Datasheet à télécharger ici
- Modèle de l'anémomètre
- 1 impulsion = 2,4 km/h
- Connexion à un shield Tinkerkit v2 monté sur une Netduino plus 2.

Archives
Le projet contenant l'exemple pour la carte Netduino, à programmer avec l'IDE Visual Studio Community 2015, est téléchargeable ici
2.2.2 Anémomètre analogique SEN0170

2.2.2.1 Présentation
- Source : wiki DFROBOT
- Distributeur : Gotronic
- Caractéristiques
- Alimentation : 12 à 24 Vcc
- Consommation : < 0,3 W
- Sorties :
- analogique : 0 à 5 Vcc
- 4-20 mA
- Plage de mesure efficace : 0 à 30 m/s
- Vitesse de démarrage : 0,4 à 0,8 m/s
- Résolution : 0,1 m/s
- Erreur : ± 3 %
- Longueur de cordon maxi : 8 m
- Dimensions : 200 x 128 mm
- Poids : 1 kg
- Connectique
- Rouge : +12-24 V
- Noir : GND
- Jaune : tension 0-5V
- Bleu : courant 4-20mA
- Principe de fonctionnement (Wikipédia)

![]()
- La courbe d'étalonnage est téléchargeable ici

2.2.2.2 Exemples de code
- Ressource : wiki DFROBOT
- Connexion à une Base Shield V2 montée sur une Arduino Uno

- Exemple pour tester le capteur
![]()
- *.cpp
/*! * @file SEN0170.ino * @brief Reading wind speed rating * @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com) * @license The MIT License (MIT) * @author DFRobot * @version V1.0 * @date 2023-08-03 */ void setup() { Serial.begin(9600); } void loop() { int sensorValue = analogRead(A0); float outvoltage = sensorValue * (5.0 / 1023.0); Serial.print("outvoltage = "); Serial.print(outvoltage); Serial.println("V"); int Level = 6 * outvoltage;//The level of wind speed is proportional to the output voltage. Serial.print("wind speed is "); Serial.print(Level); Serial.println(" level now"); Serial.println(); delay(500); }
3. Pluviométrie
3.1 Pluviomètre SEN0575

3.1.1 Présentation
- Source : wiki DFROBOT
- Distributeur : GoTronic
- Caractéristiques
- Alimentation : 3,3 à 5,5 Vcc
- Consommation : < 3 mA
- Interface : I2C (SLA = 0x1D) ou UART(sélection avec un inverseur)
- Résolution : 0,2794 mm (1 impulsion)
- Température de service : -40 à 85 °C
- Dimensions :
- carte : 32 x 37 mm
- capteur : 118 x 59 x 80 mm
- Poids : 119 g
- Principe
- Ressource : Comment fonctionnent les capteurs de pluie.
Le pluviomètre à augets basculants SEN0575 est composé de pièces de mesure et de pièces recueillant la pluie. Lorsqu'il pleut, l'eau de pluie tombe dans l'entonnoir et s'écoule dans l'auget basculant (A ou B). Lorsque l’accumulation d’eau atteint une certaine hauteur, l’auget x perd l’équilibre et se renverse. Chaque fois qu'il se vide, un contact électrique se ferme, envoyant une impulsion au circuit adaptateur principalement composé d’un microcontrôleur CS32L010. 
- Adaptateur Gravity

- Connexions
| N° | Des. | Description |
|---|---|---|
| 1 | D/T | I2C → SDA ou UART → TX |
| 2 | C/R | I2C → SCL ou UART → RX |
| 3 | - | GND |
| 4 | + | 3,5V - 5V |
![]()
- Documentation
- Schéma de l'adaptateur Gravity à télécharger ici

- Chronogrammes
- Relevé des signaux sur le bus I2C : H=2,7940mm, 10 impulsions, H=2,7940mm/h, Temps de fonctionnement = 0,62h . A télécharger ici.
3.1.2 Bibliothèques
- A partir du gestionnaire de bibliothèques de l'IDE Arduino, installer :

3.1.3 Exemples de code
- Ressources
- wiki DFROBOT

- Fiche guide pour l'étude d'une chaîne d'information comprenant un pluviomètre à augets [Télécharger]
- Connexion à une Base Shield V2 montée sur une Arduino Uno
![]()
- Exemple de l'IDE Arduino pour tester le capteur
Dans l'IDE Arduino, sélectionner : Fichier → Exemples → DFRobot_RainfallSensor → readData