Table des matières
![]()
![]()
![]()
Chorégraphe et Python - Domotique avec Pepper et Raspberry Pi
En cours de rédaction
[Mise à jour le 10/1/2019]
Niveau : avancé
Objectif
Contrôler les entrées, sorties logiques d'un Raspberry Pi “à la voix”.
Vidéo
Source
Pepper peut faire de la Domotique (Site PwavRobot)
Remarques préalables
Pour tenir compte du matériel disponible, l'état logique des sorties de la carte Raspberry Pi est simplement visualisé avec des LED. Le flux Chorégraphe de la source du projet a été adapté au matériel listé ci-dessous.
A. Préparation du Raspberry Pi
Liste du matériel
- Une carte Raspberry PI ou Raspberry PI ZERO
- Une alimentation 5V - 2,5A
- Une Card SD pour le système RASPBIAN
- 4 Led
- Raspberry Pi to Arduino Shield (optionnel)
- Sensor shield v2 Tinkerkit ou Module Grove Base Shield (optionnel)
Photo du montage à ajouter
Les connexions
L'utilisation d'un Raspberry Pi to Arduino Shield et d'un Sensor shield v2 Tinkerkit simplifie la mise en oeuvre puisqu'il suffit de supperposer les cartes comme sur la photo ci-dessus.
Tinkerkit → Arduino Shield → Raspberry Pi
O0 → 11 → GPIO10
O1 → 10 → GPIO8
O2 → 9 → GPIO22
O3 → 6 → GPIO4
O4 → 5 → GPIO25
O5 → 3 → GPIO23
Installation de Raspbian sur la carte µSD
Suivre la démarche proposé sur le site Raspberrypi.org.
Installation du serveur Python
- Créer un fichier server.py avec l'éditeur Geany et le sauvegarger dans homme/pi/.
- Copier le code ci-dessous dans le fichier server.py
- server.py
#!/usr/bin/python # coding: utf-8 import socket import threading import RPi.GPIO as GPIO from time import sleep def clear(): print(' \n' * 80) class ClientThread(threading.Thread): def __init__(self, ip, port, clientsocket): threading.Thread.__init__(self) self.ip = ip self.port = port self.clientsocket = clientsocket print("[+] Nouveau thread pour %s %s" % (self.ip, self.port, )) def run(self): print("Connection de %s %s" % (self.ip, self.port, )) r = self.clientsocket.recv(2048) print("Instruction recue: " + r + "...") port, etat = r.split(",") print("GPIO:"+port + " / Etat:"+etat+" ") # Envoi du signal HIGH sur la pate #4 GPIO pour coller le relai # Le GPIO est sur ON if etat == 'HIGH': print "Off" GPIO.output(int(port), GPIO.HIGH) sleep(1) exit() if etat == "LOW": print "On" GPIO.output(int(port), GPIO.LOW) sleep(1) exit() print("Client déconnecté...") tcpsock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) tcpsock.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1) tcpsock.bind(("", 1111)) clear() print "(c)2016 - Dr CADIC - Serveur de pilotage des GPIO sur Pi ou PiZero avec le robot Pepper" # Mise en mode adequat BCM et definition du numéro de port GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) # Définit la sortie GPIO à activer GPIO.setup(4, GPIO.OUT) GPIO.setup(25, GPIO.OUT) GPIO.setup(22, GPIO.OUT) GPIO.setup(23, GPIO.OUT) while True: tcpsock.listen(10) print("En ecoute...") (clientsocket, (ip, port)) = tcpsock.accept() newthread = ClientThread(ip, port, clientsocket) newthread.start()
- Ouvrir une console et entrer : pi@Raspi2:~ $ python relay_server.py. La console doit afficher le message ci-dessous.

Le serveur se met en écoute des messages envoyés par Pepper.
B. Préparation de Pepper
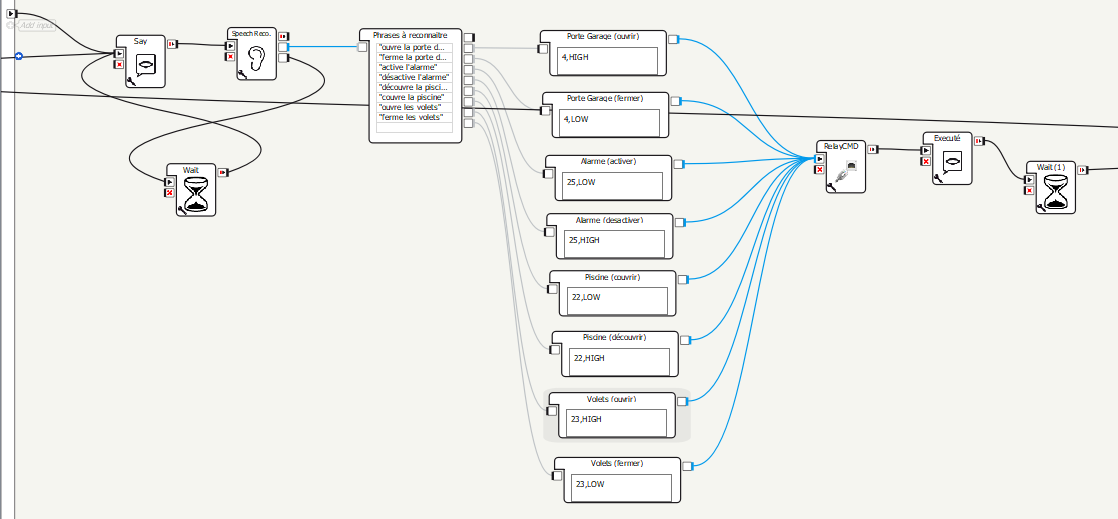
Le flux Chorégraphe
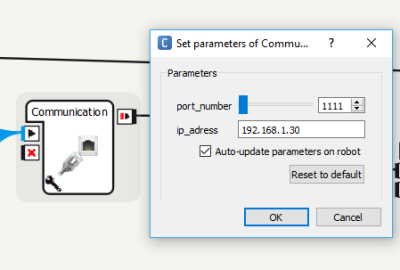
La boîte "Communication"
- Paramétrage
Pour que la communication s'établisse, il faut entrer l'adresse IP du Raspberry Pi (serveur) et le port sur lequel il écoute.
Exemple
- Code
 La code contenu dans la boîte communication est listé ci-dessous.
La code contenu dans la boîte communication est listé ci-dessous.
- client.py
class MyClass(GeneratedClass): def __init__(self): GeneratedClass.__init__(self) def onLoad(self): #put initialization code here pass def onUnload(self): #put clean-up code here pass def onInput_onStart(self, p): #self.onStopped() #activate the output of the box # p est l'instruction à envoyer au serveur import socket # Recup des parametres de la boite ip_address=self.getParameter("ip_adress") port_number=self.getParameter("port_number") # Connexion au serveur avec IP et port s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) s.connect((ip_address, port_number)) s.send(p) r = s.recv(9999999) self.onStopped() pass def onInput_onStop(self): self.onUnload() #it is recommended to reuse the clean-up as the box is stopped self.onStopped() #activate the output of the box
Télécharger
Le code source de l'exemple Domotique est téléchargeable A venir.