Table des matières
![]()
Capteurs - Force - Phidgets
[Mise à jour le 25/6/2024]
1. Généralités
 Le but des extensomètres à fils résistants ou jauges de déformation (ou, abusivement, jauges de contrainte) est de traduire la déformation d'une pièce en variation de résistance électrique (plus les extensomètres s'étirent, plus leurs résistances augmentent). Elles consistent en des spires rapprochées et sont généralement fabriquées à partir d'une mince feuille métallique (quelques µm d'épaisseur) et d'un isolant électrique, que l'on traite comme un circuit imprimé (par lithographie et par attaque à l'acide). Wikipédia
Le but des extensomètres à fils résistants ou jauges de déformation (ou, abusivement, jauges de contrainte) est de traduire la déformation d'une pièce en variation de résistance électrique (plus les extensomètres s'étirent, plus leurs résistances augmentent). Elles consistent en des spires rapprochées et sont généralement fabriquées à partir d'une mince feuille métallique (quelques µm d'épaisseur) et d'un isolant électrique, que l'on traite comme un circuit imprimé (par lithographie et par attaque à l'acide). Wikipédia
Un capteur de force est un tranducteur convertissant une force en un signal électrique mesurable. Bien qu'il existe une variété de capteurs, les capteurs de force à jauges de déformation sont les plus utilisés et dominent notamment le secteur de pesage. Les cellules de charge à jauge de déformation fournissent des précisions de 0,03% à 0,25% de pleine échelle et sont adaptées à presque toutes les applications industrielles.
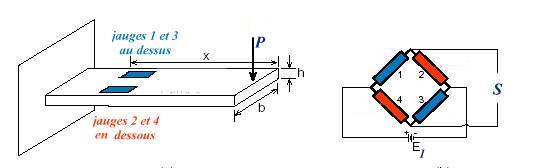
- Principe de la mesure d'une force avec un pont de jauges
2. Capteurs de force
2.1 Capteur 780 g

2.1.1 Présentation
- Source : wiki Phidgets “Guide des jauges de contrainte”.
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 5 Vcc (3 à 10 Vcc)
- Plage de mesure: 0 à 780 g
- Sortie: 800 µV/V
- Erreur maxi: ±100 µV/V
- Brochage:
- Rouge: + 5Vcc
- Noir: GND
- Vert: +
- Blanc: -
![]()
- Documentation
2.2 Capteur 20kg
2.2.1 Présentation
- Source : wiki Phidgets “Guide des jauges de contrainte”.
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 5 Vcc (3 à 10 Vcc)
- Plage de mesure: 0 à 20kg
- Sortie: 1mV/V
- Erreur maxi: ±150 µV/V
- Brochage:
- Rouge: + 5Vcc
- Noir: GND
- Vert: +
- Blanc: -
![]()
- Documentation
2.3 Capteur 200 kg

2.3.1 Présentation
- Source : wiki Phidgets “Guide des jauges de contrainte”.
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 5 Vcc (via la carte 1046)
- Plage de mesure: 0 à 200 kg
- signal de sortie: 1 mV/V
- Surcharge maxi: 240 kg
- Brochage:
- Rouge: + 5Vcc
- Noir: GND
- Vert: +
- Blanc: -
- Longueur du câble: 3 mètres
![]()
- Documentation
2.4 Capteur Grove 101020553

2.4.1 Présentation
- Source : Wiki seeed studio.
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 3,3 et 5 Vcc
- Sortie: analogique (0 à 650)
- Interface: compatible Grove
- Dimensions: 20 x 20 x 13 mm
![]()
- Documentation
- Fiche technique FSR402

2.4.2 Exemples de code
- Connexion à un shield Tinkerkit v2
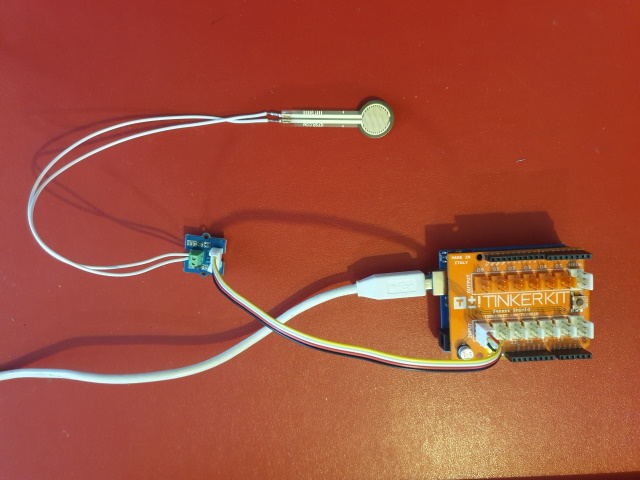
- Exemple pour tester le capteur
![]()
- *.cpp
const int captforce = A0; // Le module est connecté à la broche A0 de la carte (IO du connecteur Tinkerkit) int Nforce; // Valeur délivrée par le CAN void setup(){ Serial.begin(9600); // Initialisation du moniteur série } void loop(){ Nforce = analogRead(captforce); // Lit la valeur du CAN Serial.println(Nforce); // et l'affiche dans le moniteur série // A compléter pour déterminer la force exercée sur le capteur delay(1000); // Attente s entre deux valeurs }
3. Amplificateurs d'instrumentation
3.1 Module Phidgets 1046_1

- Source : wiki Phidgets
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 5 Vcc (via le port mini-USB)
- Consommation: 15 mA
- Courant disponible pour les capteurs: 465 mA maxi
- TTaux de rafraîchissement : de 1 à 60000 ms
- Réglage du gain: 1, 8, 16, 32, 64, 128
- Température de service: -40 à 80 °C
- Dimensions: 53 x 44 x 21 mm.
![]()
- Documentation
- Fiche technique PhidgetBridge 4-Input

3.2 HX711
3.2.1 Présentation
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 2,7 à 5 Vcc
- Consommation: < 1,5 mA
- Fréquence: 10 ou 80 mesures/sec
- Gain : 32 (canal B),64 ou 128 (canal A )
- T° de service: -40 à +85 °C
- Dimensions: 31 x 23 x 15 mm
![]()
- Schéma : à télécharger ici
- Connexions à une carte Arduino
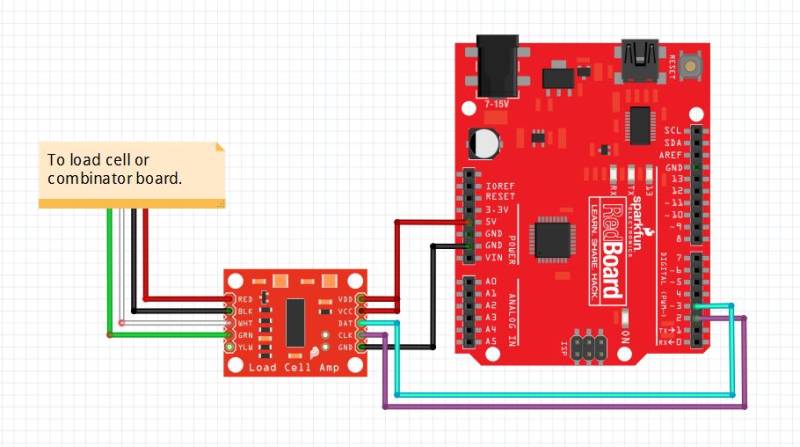
![]()
- Documentation
- Datasheet du circuit HX711
3.2.2 Bibliothèques
- A partir du gestionnaire de bibliothèques de l'IDE Arduino, installer :

3.2.3 Exemples de code
![]()
- Exemple 1 de l'IDE Arduino pour tester le capteur
Dans l'IDE Arduino, sélectionner : Fichier → Exemples → DFRobot_HX711 → readWeight
- Exemple 2 : Etalonnage d'un capteur CZL204E-200
- Connexion à un shield Tinkerkit v2
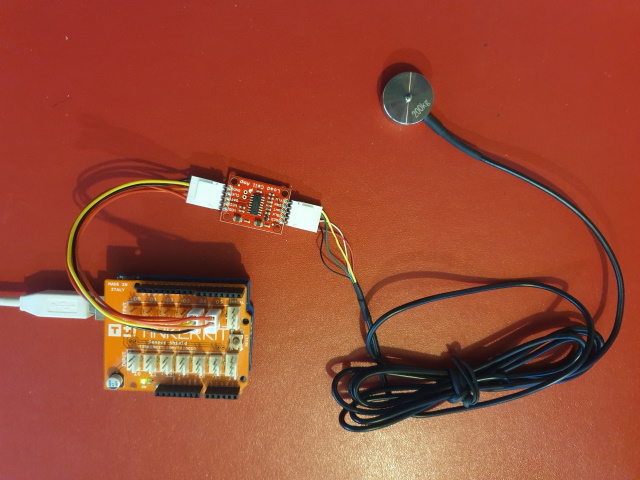
![]()
- *.cpp
/* Arduino pin 5 -> HX711 CLK pin 3 -> HX711 DOUT 5V -> VCC GND -> GND */ #include "HX711.h" #define LOADCELL_DOUT_PIN 3 #define LOADCELL_SCK_PIN 5 HX711 scale; float calibration_factor = -14000; //-7050 worked for my 440lb max scale setup void setup() { Serial.begin(9600); Serial.println("Etalonnage du HX711"); Serial.println("Retirer le poids de la balance"); Serial.println("Au début des lectures, placer un poids connu sur la balance"); Serial.println("Entrer + ou a dans la console pour augmenter le facteur d'étalonnage"); Serial.println("Entrer - ou z dans la console pour diminuer le facteur d'étalonnage"); scale.begin(LOADCELL_DOUT_PIN, LOADCELL_SCK_PIN); scale.set_scale(); scale.tare(); // Echelle à 0 long zero_factor = scale.read_average(); // Lecture de référence Serial.print("Zero factor: "); Serial.println(zero_factor); } void loop() { scale.set_scale(calibration_factor); // Ajuster à ce facteur d'étalonnage Serial.print("Lecture: "); Serial.print(scale.get_units(), 1); Serial.print(" kg"); // Unités SI Serial.print(" facteur_étalonnage: "); Serial.print(calibration_factor); Serial.println(); if(Serial.available()) { char temp = Serial.read(); if(temp == '+' || temp == 'a') calibration_factor += 10; else if(temp == '-' || temp == 'z') calibration_factor -= 10; } }
3.3 Nuvoton NAU7802 pour capteur de force (I2C)

3.3.1 Présentation
- Distributeur : Gotronic
- Caractéristiques
- Alimentation : 3,3 Vcc
- Interface I2C (SLA=0x2A)
- sur connectique Qwiic ou pastilles à souder
- Dimensions : 36 x 26 x 16 mm
- Schéma-blocs

- Application typique

![]()
- Documentation
- Datasheet du circuit à télécharger ici

- Chronogrammes
- Relevé des signaux du bus I2C . A télécharger ici.
3.3.2 Bibliothèques
- A partir du gestionnaire de bibliothèques de l'IDE Arduino, installer :

3.3.3 Exemples de code
- Ressources
- Guide d'utilisation Sparkfun.

- Fiche guide pour l'étude d'une chaîne d'information comprenant un module NAU7802 [Télécharger]
![]()
- Exemple de l'IDE Arduino pour tester le capteur
Dans l'IDE Arduino, sélectionner : Fichier → Exemples SparkFun Qwiic Scale NAU7802 Arduino Library → Example1_BasicReadings