![]()
Convertisseur analogique numérique
[Mise à jour le 3/2/2020]

MCP3424
- Source : wiki
Le module DFR0316 est un module de conversion de données à circuit MCP3424 18-Bit ADC-4 Channel
- Distributeur : Mouser
- Caractéristiques
- Alimentation: 2,7 à 5,5 Vcc
- Consommation en standby: 300 nA sous 5 Vcc
- Gain programmable PGA: x1, x2, x4 ou x8
- Plage de mesure différentielle: de -2,048/Gain à +2,048/Gain (par exemple de -0,512 à +0,512 V pour un gain de 4)
- Résolution programmable: 12, 14, 16 ou 18 bits
- Vitesse: 240, 60, 15 ou 3,75 mesures/seconde
- Erreur gain: 0,05 % (gain = 1 sous 18 bits)
- Erreur offset: 15 µV (gain = 1 sous 18 bits)
- Interface I2C: 0X68, 0X6A, 0X6C ou 0X6E (sélectionnable par dip-switch)
- Référence de tension interne: 2,048 Vcc ± 0,05%
- T° de service: -40 à +125 °C
- Dimensions: 27 x 16 x 12 mm
![]()
- Présentation du circuit sur Github
- Documentation : pdf à télécharger
- Programmation d'une carte Arduino Uno R3

- Bibliothèques à installer dans l'IDE : MCP342x
- Sources sur Github

- Connexion à un shield Tinkerkit v2 monté sur une Arduino Uno
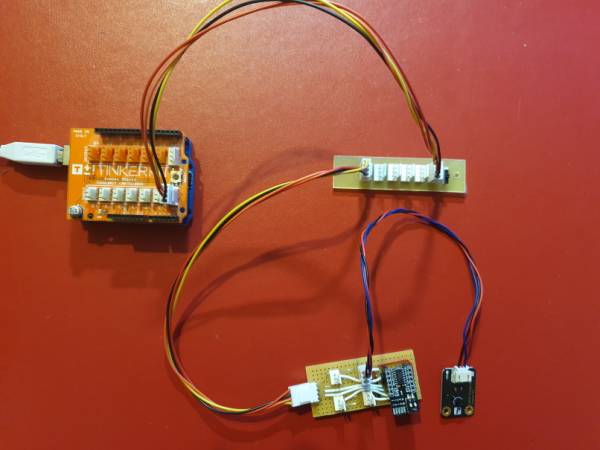
- Un premier exemple pour tester le circuit
![]()
- *.cpp
// Connexion à un capteur de température LM35 #include <Wire.h> #include <MCP342x.h> // 0x68 est l'adresse par défaut des circuits MCP342x uint8_t address = 0x68; // Création de l'objet adc MCP342x adc = MCP342x(address); void setup(void) { // Initialisation de la console Serial.begin(9600); // Initialisation du bus I2C Wire.begin(); // Enable power for MCP342x (needed for FL100 shield only) //pinMode(9, OUTPUT); //digitalWrite(9, HIGH); // Reset du circuit MCP342x::generalCallReset(); delay(1); // MC342x nécessite 300us pour se paramétrer, on attend 1ms // Vérification de la présence du MCP342x Wire.requestFrom(address, (uint8_t)1); if (!Wire.available()) { Serial.print("Pas de circuit à cette adresse "); Serial.println(address, HEX); while (1) ; } } void loop(void) { long value = 0, tension_mV = 0; int gain, resolution; MCP342x::Config status; // --------------------------------------------------------------------------------------- // Déclenchement d'une conversion. La méthode convertAndRead() attend la fin de la conversion // On passe les paramètres suivants à la fonction dans l'ordre : // - canal : channel1, channel2, channel3 ou channel4 pour un MCP3424 // - type de conversions : oneshot ou continous // - résolution : resolution12, resolution14, resolution16 ou resolution18 // - gain : gain1, gain2, gain4 ou gain8 // timeout = temps accordé à la transaction en ms (1000000 dans cet exemple !) // A l'issue de la conversion // - value = gain * (2^résolution/2^12) * tension du canal sélectionné en mv // - status identifie la valeur du gain et de la résolution // | gain | résolution | status | // | 1 | 12bits | 0 | // | 2 | 12 | 1 | // | 4 | 12 | 2 | // | 8 | 12 | 3 | // | 1 | 14bits | 4 | // etc. // | 1 | 16bits | 8 | // etc. // | 1 | 18bits | 12 | // etc. // --------------------------------------------------------------------------------------- // Conserver la valeur des trois derniers paramètres uint8_t err = adc.convertAndRead(MCP342x::channel1, MCP342x::oneShot, MCP342x::resolution12, MCP342x::gain4, 1000000, value, status); if (err) { Serial.print("Erreur de conversion : "); Serial.println(err); } else { switch (status) { case 2: gain = 4; resolution = 12; break; case 6: gain = 4; resolution = 14; break; case 10: gain = 4; resolution = 16; break; case 14: gain = 4; resolution = 18; break; } Serial.print("value = "); Serial.println(value); Serial.print("Tension sur le canal 1 : "); tension_mV = value / (gain * pow(2, resolution - 12)); Serial.print(tension_mV); Serial.println("mV"); Serial.print("Temperature mesuree par le LM35 : "); Serial.print(tension_mV / 10.0); Serial.println("C"); } delay(1000); }
![]()
Le projet pour l'IDE VSCode de l'exemple ci-dessus est téléchargeable ici