Ceci est une ancienne révision du document !
![]()
Capteurs - Distance - Ultrasons
[Mise à jour le 7/7/2022]
- Lectures connexes
- Vidéo - Exemples d'applications
1. Généralités
 L'ultrason est une onde mécanique et élastique, qui se propage au travers de supports fluides, solides, gazeux ou liquides. La gamme de fréquences des ultrasons se situe entre 16 000 et 10 000 000 Hertz.
L'ultrason est une onde mécanique et élastique, qui se propage au travers de supports fluides, solides, gazeux ou liquides. La gamme de fréquences des ultrasons se situe entre 16 000 et 10 000 000 Hertz.
Le nom vient du fait que leur fréquence est trop élevée pour être audible pour l'oreille humaine (le son est trop aigu : la gamme de fréquences audibles par l'homme se situe entre 20 et 20 000 Hertz. Ces seuils sont cependant variables avec l'âge), de la même façon que les infrasons désignent les sons dont la fréquence est trop faible pour être perceptible par l'oreille humaine. Lorsque la fréquence est audible pour l'oreille humaine, on parle tout simplement de son.
Les ultrasons sont utilisés dans l'industrie ainsi que dans le domaine médical. Wikipédia
2. Capteurs numériques
2.1 HC-SR04

- Source : wiki
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 5 Vcc
- Consommation: 15 mA
- Fréquence: 40 kHz
- Portée: de 6…10 cm à 4 m
- Déclenchement: impulsion TTL positive de 10µs
- Signal écho: impulsion positive TTL proportionnelle à la distance.
- Calcul: distance (cm) = impulsion (µs) / 58
- Dimensions: 45 x 21 x 18 mm
![]()
- Documentation
- Fichier Acrobat Reader à télécharger ici
- Programmation d'une carte Arduino Mega 2560
- Bibliothèques à installer dans l'IDE : aucune
- Connexion à un shield Tinkerkit Mega v2.
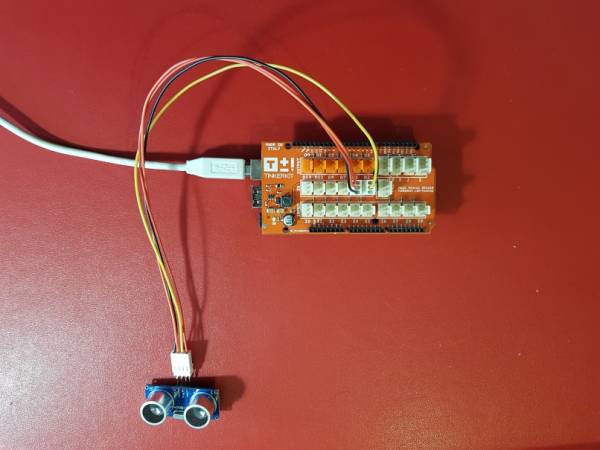
- Un premier exemple

- HCSR04.cpp
/* * Code d'exemple pour un capteur à ultrasons HC-SR04. * Carte Arduino Mega 2560 */ /* Constantes pour les broches */ const byte TRIGGER_PIN = 2; // Broche TRIGGER const byte ECHO_PIN = 4; // Broche ECHO /* Constantes pour le timeout */ const unsigned long MEASURE_TIMEOUT = 25000UL; // 25ms = ~8m à 340m/s /* Vitesse du son dans l'air en mm/us */ const float SOUND_SPEED = 340.0 / 1000; /** Fonction setup() */ void setup() { /* Initialise le port série */ Serial.begin(115200); /* Initialise les broches */ pinMode(TRIGGER_PIN, OUTPUT); digitalWrite(TRIGGER_PIN, LOW); // La broche TRIGGER doit être à LOW au repos pinMode(ECHO_PIN, INPUT); } /** Fonction loop() */ void loop() { /* 1. Lance une mesure de distance en envoyant une impulsion HIGH de 10µs sur la broche TRIGGER */ digitalWrite(TRIGGER_PIN, HIGH); delayMicroseconds(10); digitalWrite(TRIGGER_PIN, LOW); /* 2. Mesure le temps entre l'envoi de l'impulsion ultrasonique et son écho (si il existe) */ long measure = pulseIn(ECHO_PIN, HIGH, MEASURE_TIMEOUT); /* 3. Calcul la distance à partir du temps mesuré */ float distance_mm = measure / 2.0 * SOUND_SPEED; /* Affiche les résultats en mm, cm et m */ Serial.print(F("Distance: ")); Serial.print(distance_mm); Serial.print(F("mm (")); Serial.print(distance_mm / 10.0, 2); Serial.print(F("cm, ")); Serial.print(distance_mm / 1000.0, 2); Serial.println(F("m)")); /* Délai d'attente pour éviter d'afficher trop de résultats à la seconde */ delay(500); }

2.2 Module VMA306 à capteur HC-SR05

- Source : pdf
- Distributeur : Gotronic
- Caractéristiques
- Alimentation: 4,5 à 5,5 Vcc
- Consommation:
- mini: 10 mA
- maxi: 40 mA
- Fréquence: 40 kHz
- Portée: de 2 cm à 4,5 m
- Déclenchement: impulsion TTL positive de 10µs
- Signal écho: impulsion positive TTL proportionnelle à la distance.
![]()
- Documentation
- Manuel d'utilisation du capteur à ultrasons VMA306 à télécharger ici
- Programmation d'une carte Arduino Uno R3
- Bibliothèques à installer dans l'IDE : aucune
- Connexion à un shield Tinkerkit v2.

- Un premier exemple
- HCSR05.cpp
/////////////////////////////////////////////// // Programme test pour capteur HC-SR05 // // Go Tronic 2017 // /////////////////////////////////////////////// #define trigPin 10 // Tinkerkit O1 #define echoPin 11 // Tinkerkit O0 long duration, distance; void setup() { Serial.begin(9600); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); Serial.println("== Debut du programme =="); } void loop() { // Envoie de l'onde digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Réception de l'écho duration = pulseIn(echoPin, HIGH); // Calcul de la distance distance = (duration / 2) / 29.1; if (distance >= 400 || distance <= 0) { Serial.println("Hors plage"); } else { Serial.print("distance = "); Serial.print(distance); Serial.println(" cm"); } delay(500); // délai entre deux mesures }